Hidden in Fash - UmassCTF2025
Reto basado en leer una EPROM para obtener un juego flash y desvelar el secreto.

Autor del reto: Sanderbeggar
Dificultad: Fácil
Enunciado
“My friend gave me a tiny square chip and said it had a flash player game with a secret in it. I figured out the chip is an CAT24C64B EEPROM module and hooked it up to an Arduino UNO R3. Can you help me write some code to read the game and find the secret?
Server Details:
Accepts ELF binaries up to 64 KiB Max runtime of 5 seconds (based on clock cycles) Max UART output of 4 kiB
python client.py
Ver pista I think I saw a program that could open this but I need to get the file off the chip.
Ver pista I wonder what metadata this file has?”
Archivos
Este reto nos da el siguiente archivo.
client.py: Contiene el archivo de conexión a la EPROM.
Archivos utilizados en mi repositorio de Github.
Analizando el reto
En este reto, tenemos que leer la EPROM CAT24C64B para poder conseguir el juego flash en su interior y obtener la flag. Para ello tenemos un script de conexión client.py
Solver
Primero que nada tenemos que encontrar el esquemático oficial de la EPROM CAT24C64B EEPROM para ello una búsqueda rápida en internet y encontramos su datasheet.
Para leer la EPROM a través del servidor, primero que encontrar la dirección de memoria donde comienza el I2C. Según el datasheet la dirección de comienzo se encuentra entre la dirección 0x50 y 0x57. Para encontrarla exactamente utilicé el siguiente script.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
#include <avr/io.h>
#include <util/twi.h>
#include <util/delay.h>
#define F_CPU 16000000UL
void uart_init(void) {
UBRR0H = 0;
UBRR0L = 103;
UCSR0B = (1 << TXEN0);
UCSR0C = (1 << UCSZ01) | (1 << UCSZ00);
}
void uart_send(uint8_t b) {
while (!(UCSR0A & (1 << UDRE0)));
UDR0 = b;
}
void uart_print(const char *s) {
while (*s) uart_send(*s++);
}
void uart_print_hex(uint8_t b) {
const char hex[] = "0123456789ABCDEF";
uart_send(hex[b >> 4]);
uart_send(hex[b & 0x0F]);
}
void i2c_init(void) {
TWSR = 0;
TWBR = 72;
TWCR = (1 << TWEN);
}
uint8_t i2c_check(uint8_t addr) {
TWCR = (1 << TWINT) | (1 << TWSTA) | (1 << TWEN);
while (!(TWCR & (1 << TWINT)));
TWDR = addr << 1;
TWCR = (1 << TWINT) | (1 << TWEN);
while (!(TWCR & (1 << TWINT)));
uint8_t status = TWSR & 0xF8;
TWCR = (1 << TWINT) | (1 << TWEN) | (1 << TWSTO);
return (status == 0x18 || status == 0x40); // ACK received
}
int main(void) {
uart_init();
i2c_init();
uart_print("I2C Scan:\n");
for (uint8_t addr = 0; addr < 128; addr++) {
if (i2c_check(addr)) {
uart_print("Found device at 0x");
uart_print_hex(addr);
uart_send('\n');
}
_delay_ms(50);
}
return 0;
}
Par ello, primero tenemos que compilarlo para obtener el binario .elf y pasarlo junto a un script actualizado de client.py al que llamaremos dump.py al cual le pasaremos dicho binario.elf
Para compilarlo crearemos un Makefile con las siguientes instrucciones.
1
2
3
4
5
6
7
8
9
10
11
12
MCU = atmega328p
F_CPU = 16000000UL
CC = avr-gcc
CFLAGS = -std=gnu11 -Wall -Os -mmcu=$(MCU) -DF_CPU=$(F_CPU)
all: dump.elf
dump.elf: main.c
$(CC) $(CFLAGS) -o dump.elf main.c
clean:
rm -f dump.elf
El script dump.py es el siguiente:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
from sys import argv
import sys
import socket
import time
MAX_SIZE = 64 * 1024
HOST = "hardware.ctf.umasscybersec.org"
PORT = 10003
if len(argv) != 2:
sys.stderr.write(f"Usage: {argv[0]} FIRMWARE_PATH\n")
exit(1)
with open(argv[1], 'rb') as f:
firmware = f.read()
if len(firmware) > MAX_SIZE:
sys.stderr.write(f"Firmware too large: {len(firmware)} > {MAX_SIZE}\n")
exit(1)
time_err = TimeoutError(
"Did not receive expected data in time. Please make sure you are submitting an ELF and try again or submit a ticket"
)
def recv(sock: socket.socket, num_bytes: int, timeout: float = 5) -> bytes:
data = b''
start = time.time()
while num_bytes > 0 and time.time() - start < timeout:
chunk = sock.recv(num_bytes)
if not chunk:
break
data += chunk
num_bytes -= len(chunk)
if num_bytes:
raise time_err
return data
def recv_until(sock: socket.socket, end: bytes, timeout: float = 5) -> bytes:
buf = b''
start = time.time()
while time.time() - start < timeout:
byte = sock.recv(1)
if byte == end:
return buf
buf += byte
raise time_err
with socket.socket(socket.AF_INET, socket.SocketKind.SOCK_STREAM) as s:
sys.stderr.write("Connecting...\n")
s.connect((HOST, PORT))
sys.stderr.write("Sending firmware...\n")
s.sendall(len(firmware).to_bytes(4, "little") + firmware)
# initial handshake
resp = recv(s, 1)
if resp != b"\x00":
sys.stderr.write("Unknown response from server\n")
exit(1)
sys.stderr.write("Running code...\n")
rsp_msgs = [
"Code ran successfully!",
"Internal error occurred while setting up sim. Please make sure you are uploading an ELF file for the atmega328p at 16MHz. If the issue persists, submit a ticket.",
"The sim crashed while running your code. Please make sure your code is built for the atmega328p at 16MHz."
]
ret = int.from_bytes(recv(s, 1), 'little')
if ret < len(rsp_msgs):
sys.stderr.write(rsp_msgs[ret] + "\n")
else:
sys.stderr.write("Unknown response from server\n")
exit(1)
# read length-prefixed UART data
length = int.from_bytes(recv(s, 4), 'little')
data = recv(s, length)
# dump raw UART bytes to stdout
sys.stdout.buffer.write(data)
1
2
3
4
┌──(kesero㉿kali)-[~]
└─$ python dump.py dump.elf
Found device at 0x54.
Listo! Una vez tenemos la dirección de comienzo, partiremos de ahí para comenzar a dumpear toda la información en su interior.
Antes que nada, volveremos a modificar el script client.py para ir leyendo cada 4.096B hasta que llegue al final y reconstruir el firwmare en cada iteración.
El script es el siguiente. (El código perteneciente a yun es mucho mejor y está más optimizado que el mío propio)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
import os
import re
import sys
import subprocess
import socket
import time
START = 0
TOTAL = 4 * 1024
HOST = "hardware.ctf.umasscybersec.org"
PORT = 10003
BUILD_DIR = "build"
def update_bounds(sketch_name="eeprom_dump.ino"):
path = os.path.join('.', sketch_name)
with open(path, 'r') as f:
code = f.read()
new_line = f"const uint32_t TOTAL = {TOTAL};\n"
pattern = r"const\s+uint\d+_t\s+TOTAL\s*=.*?;"
updated_code, count = re.subn(pattern, new_line.strip(), code)
if count == 0:
print("WARNING: No TOTAL definition found")
new_line = f"const uint32_t START = {START};\n"
pattern = r"const\s+uint\d+_t\s+START\s*=.*?;"
updated_code, count = re.subn(pattern, new_line.strip(), updated_code)
if count == 0:
print("WARNING: No START definition found")
with open(path, 'w') as f:
f.write(updated_code)
print(f"Updated TOTAL&START in {sketch_name}.")
def compile_sketch():
cmd = [
"arduino-cli", "compile",
"--fqbn", "arduino:avr:uno",
"--build-path", 'build',
'.'
]
print("Compiling sketch...")
try:
subprocess.run(cmd, check=True)
except subprocess.CalledProcessError as e:
print(f"Compilation failed: {e}")
sys.exit(1)
build_path = os.path.join('.', BUILD_DIR)
return os.path.join(build_path, "eeprom_dump.ino.elf")
def send_firmware(elf_path):
with open(elf_path, 'rb') as f:
data = f.read()
time_err = TimeoutError("Did not receive expected data in time.")
def recv(sock, num_bytes, timeout=5.0):
output = b''
start = time.time()
while num_bytes > 0 and time.time() - start < timeout:
recvd = sock.recv(num_bytes)
if not recvd:
break
num_bytes -= len(recvd)
output += recvd
if num_bytes:
raise time_err
return output
with socket.socket(socket.AF_INET, socket.SOCK_STREAM) as s:
print("Connecting...")
s.connect((HOST, PORT))
print("Sending firmware...")
s.sendall(len(data).to_bytes(4, 'little') + data)
if recv(s, 1) != b"\x00":
print("Unknown response from server")
sys.exit(1)
print("Running code...")
rsp_msgs = [
"Code ran successfully!",
"Internal error setting up sim."
"The sim crashed while running your code."
]
ret = int.from_bytes(recv(s, 1), 'little')
if ret < len(rsp_msgs):
print(rsp_msgs[ret])
else:
print("Unknown response from server")
out_len = int.from_bytes(recv(s, 4), 'little')
data = recv(s, out_len)
return data
def main():
global TOTAL, START
all_data = b''
total_iterations = 16
for i in range(total_iterations):
START = i * 1024*4
TOTAL = (i + 1) * 1024*4
print(f"Trying with START={START} and TOTAL={TOTAL}")
update_bounds()
elf = compile_sketch()
data = send_firmware(elf)
all_data += data
print(f"Received {len(data)} bytes of data.")
print(f"{i}/{total_iterations}")
print("Writing data to eeprom_dump.bin")
with open("eeprom_dump.bin", "wb") as f:
f.write(all_data)
print("Done!")
if __name__ == '__main__':
main()
Por último, tenemos que crear un código de extracción, para ello podemos hacerlo en c o en .ino directamente. En este caso el script es el siguiente.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
#include <Wire.h>
const uint8_t EE_ADDR = 0x54;
const uint32_t START = 0;
const uint32_t TOTAL = 4096;
void setup() {
Wire.begin();
Serial.begin(115200);
delay(100);
}
void loop() {
for (uint32_t addr = START; addr < TOTAL; addr += 1) {
Wire.beginTransmission(EE_ADDR);
Wire.write(uint8_t(addr & 0xFF));
Wire.write(uint8_t(addr >> 8));
Wire.endTransmission(false);
uint8_t chunk = 1;
Wire.requestFrom(EE_ADDR, chunk);
for (int i = 0; i < chunk; i++) {
while (!Wire.available()) delayMicroseconds(1);
Serial.write(Wire.read());
}
}
while (1);
}
Una vez extraida el binario perteneciente a la rom, con elcomando file podemos comprobar que tipo de archivo es.
1
2
3
4
┌──(kesero㉿kali)-[~]
└─$ file dump.bin
eeprom_dump.bin: Macromedia Flash data (compressed), version 6
Si le lanzamos un xxd a dicho binario encontramos lo siguiente.
1
2
3
4
5
6
7
8
9
10
┌──(kesero㉿kali)-[~]
└─$ xxd dump.bin
00000000: 43 57 53 06 88 9F 00 00 78 9C E4 BD 07 58 14 CD CWS.....x....X..
00000010: D2 30 DA B3 89 05 96 9C A3 48 06 C9 48 10 50 16 .......H..H.P.
00000020: 24 E7 9C 24 C3 92 24 09 0B 82 71 41 45 50 54 40 $..$..$...qAEPT@
00000030: 39 B6 2A Fd B3 9B 17 78 A9 48 F9 48 4C D8 7B 40 9.*....x.H.HL.{@
00000040: D6 E1 C9 F7 92 88 F8 C9 B0 4A 88 58 83 FB B5 87 .........J.X....
(...)
Como podemos observar, los magic bytes son CWS, este tipo de archivo corresponde a un archivo flash.swf.
Ahora solo tenemos que decompilarlo, para ello hay herramientas como jpexs-decompiler que realizan decompilados en formato .swf.
Al introducir el binario en el decompilador, podemos leer la flag en texto claro.
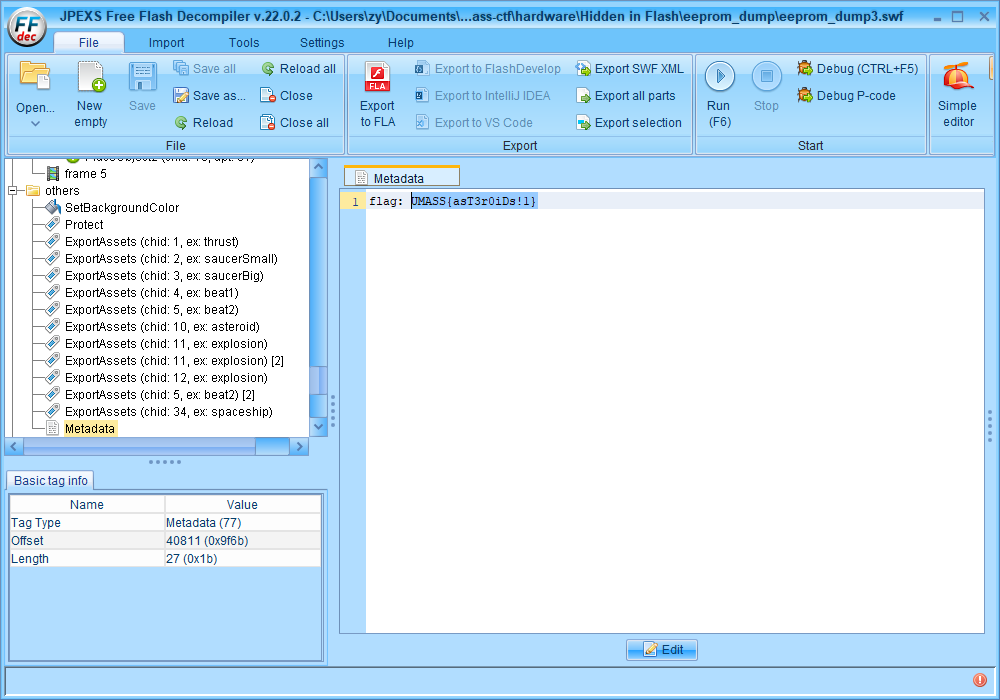
Flag
UMASS{asT3r0iDs!1}